3d Object Recognition Point Cloud
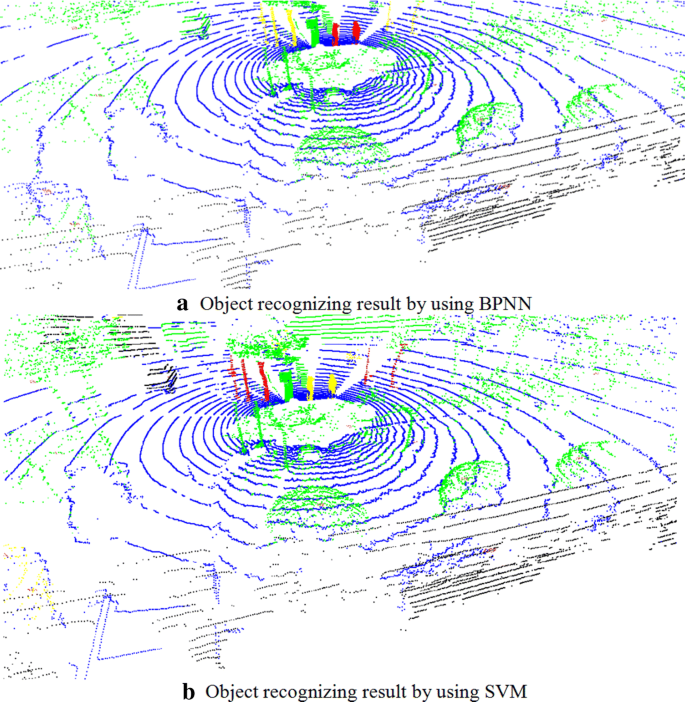
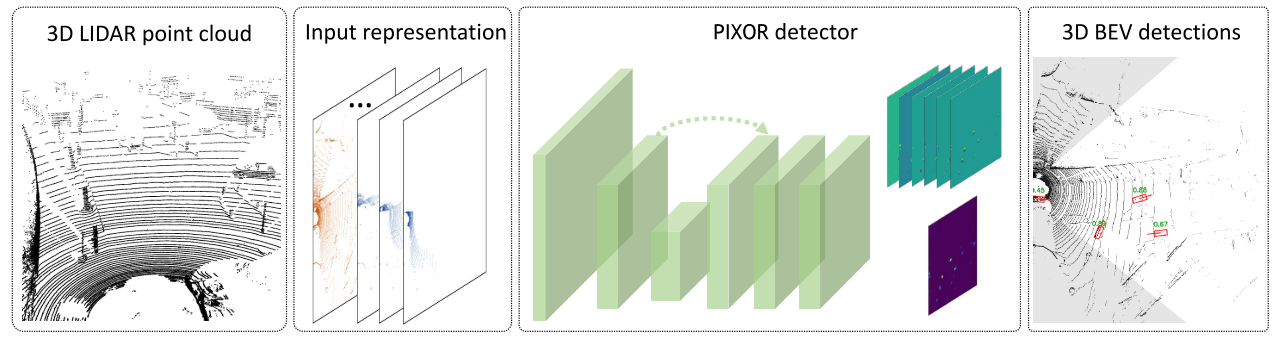
Recognize and localize an object in 3d point cloud scene using vfh svms based method and 3d cnns method.

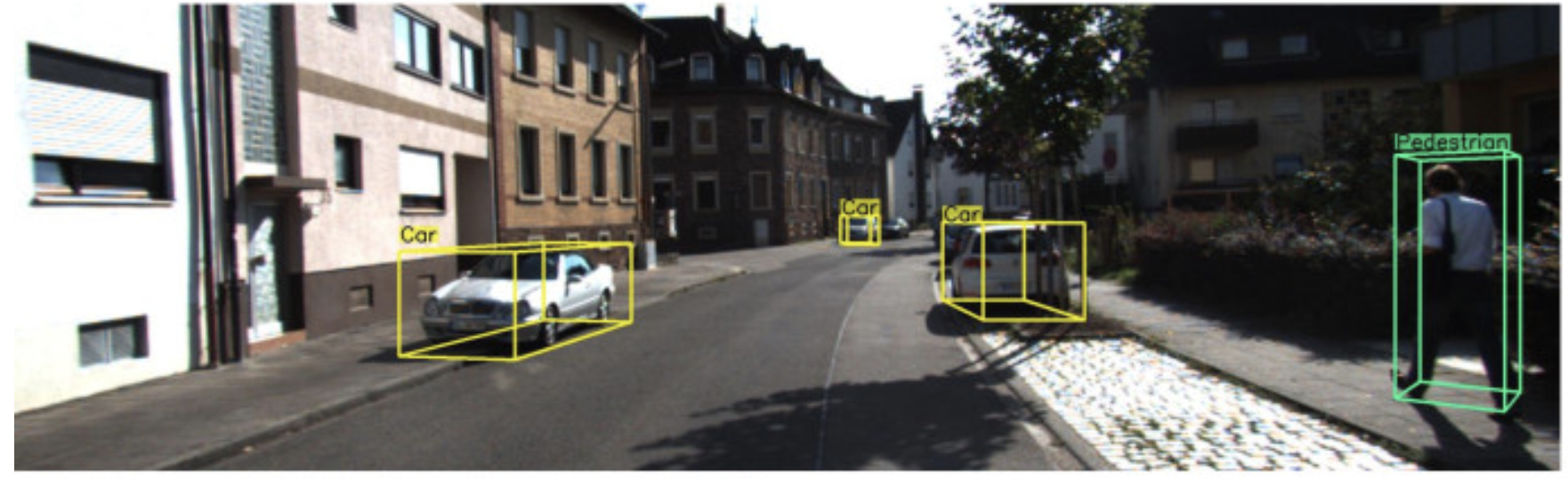
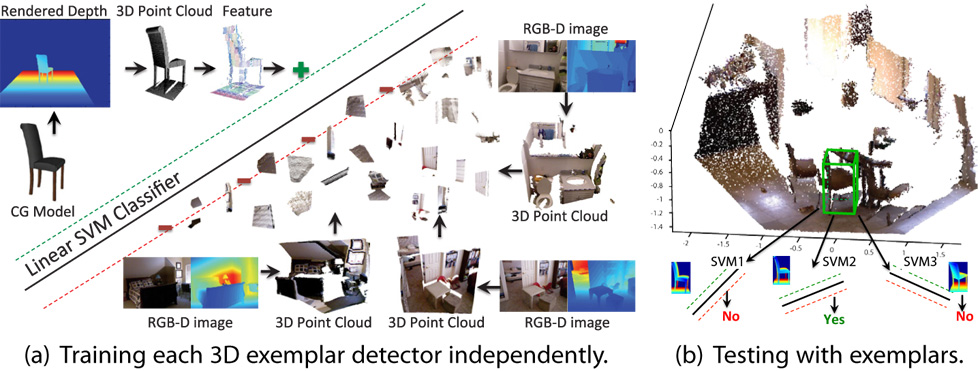
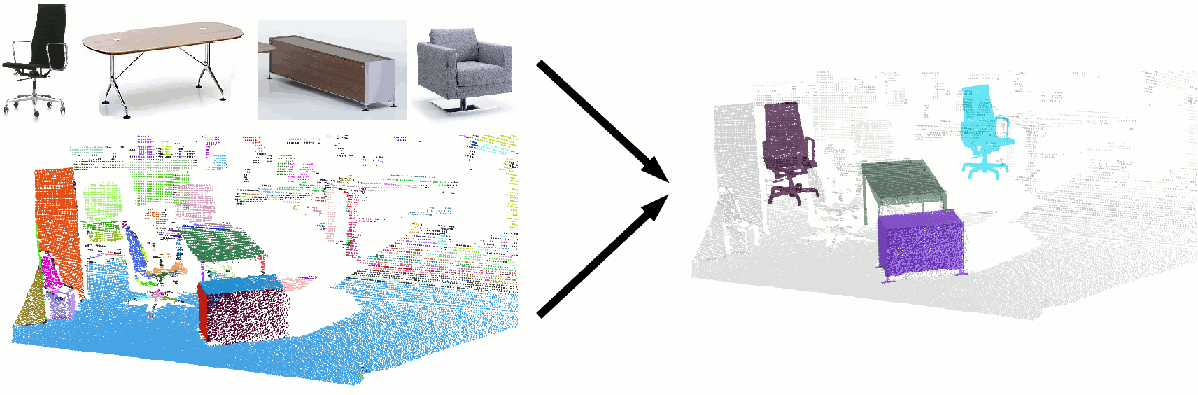
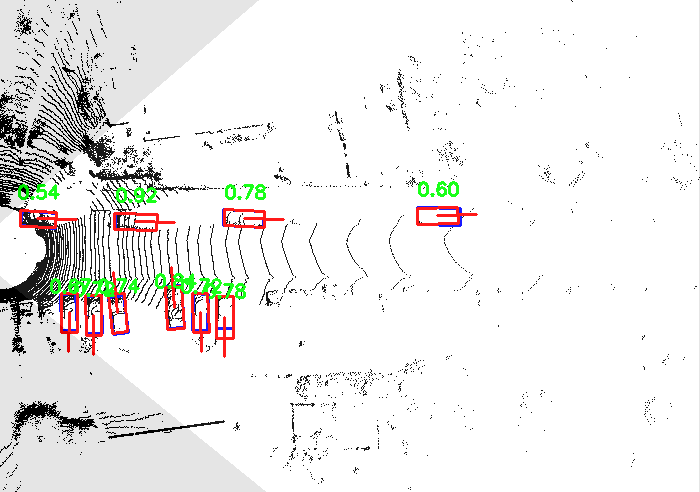
3d object recognition point cloud. This paper investigates the design of a system for rec ognizing objects in 3d point clouds of urban environments. Object recognition approaches can be divided into three broad categories. Specifically it explains how to use correspondence grouping algorithms in order to cluster the set of point to point correspondences obtained after the 3d descriptor matching stage into model instances that are present in the current scene. Graph neural network for 3d object detection in a point cloud.
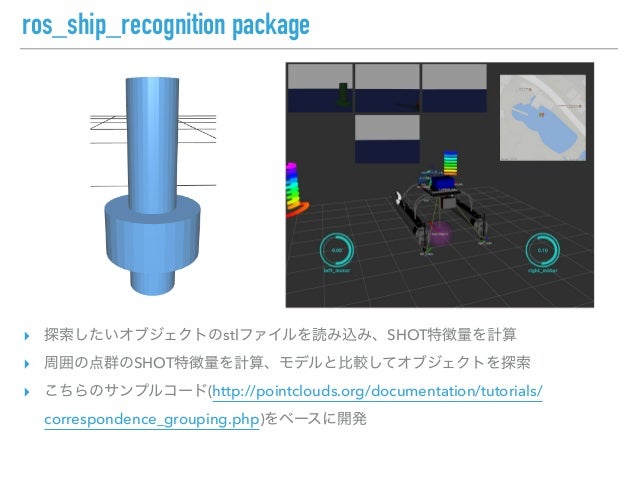
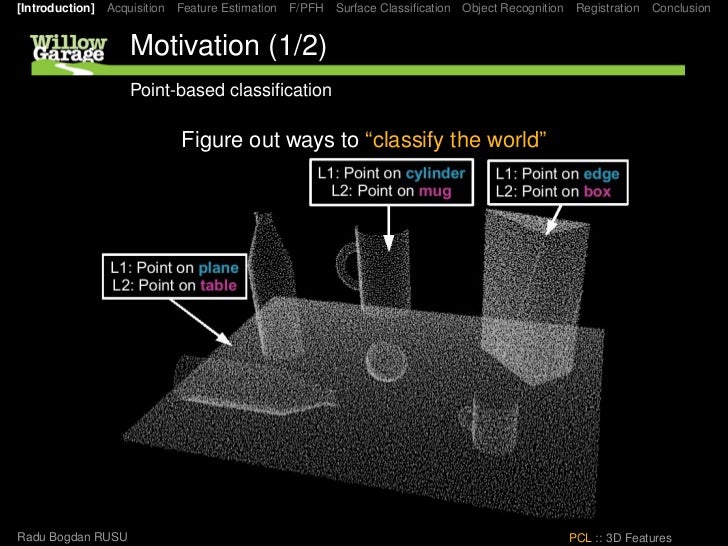
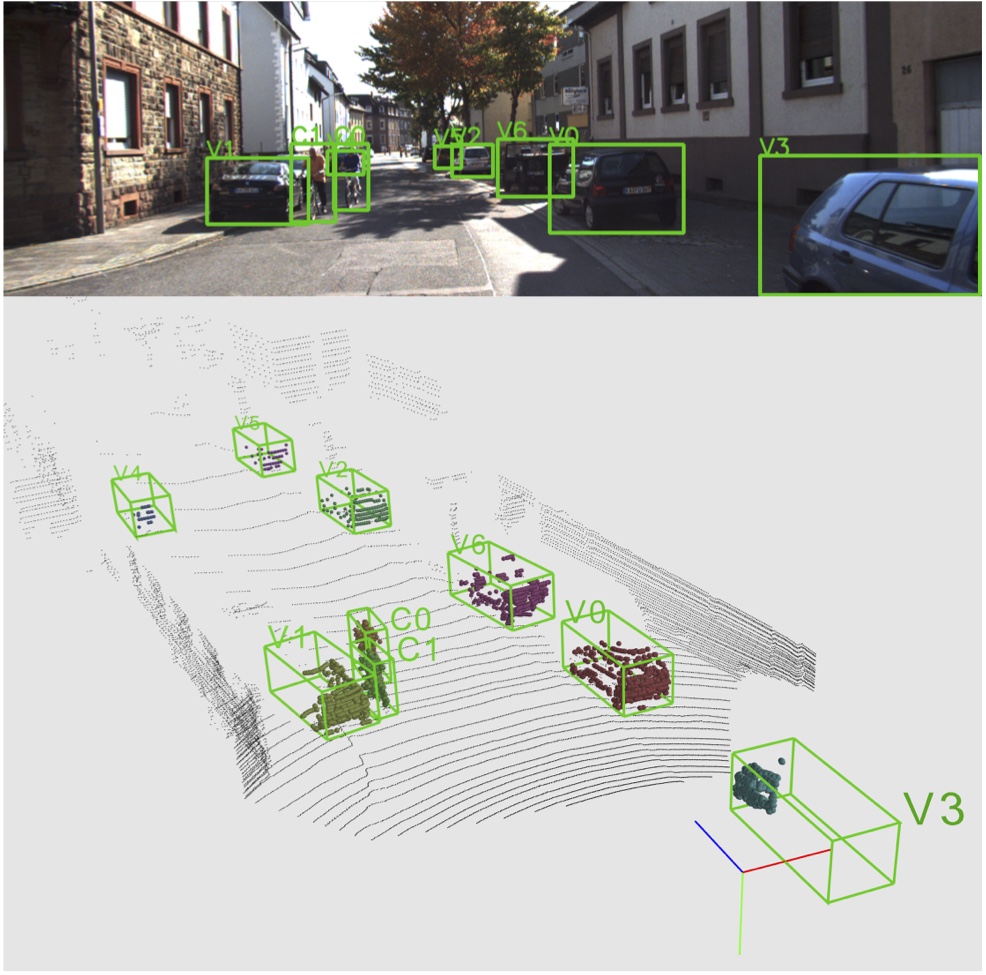
Perceptual to conceptual association for 3d point cloud object detection cvpr kitti 3d from points to parts. Successful modern day methods for 3d scene understanding require the use of a 3d sensor. This tutorial aims at explaining how to perform 3d object recognition based on the pclrecognition module. This section presents an overview of the most relevant approaches in the literature related to 3d object recognition from point clouds.
Integration with alexa and object recognition. 3 d object recognition from point clouds ilmf2011 february 2011 page 5 of 20 consisting of multiple 3 d planes we use the most reliable intersecting 3 d line from 3 d planes as the dominant direction. Monocular 3d object detection with pseudo lidar point cloud xinshuo weng kris kitani monocular 3d scene understanding tasks such as object size estimation heading angle estimation and 3d localization is challenging. 3d object detection from point cloud with part aware and part aggregation network.
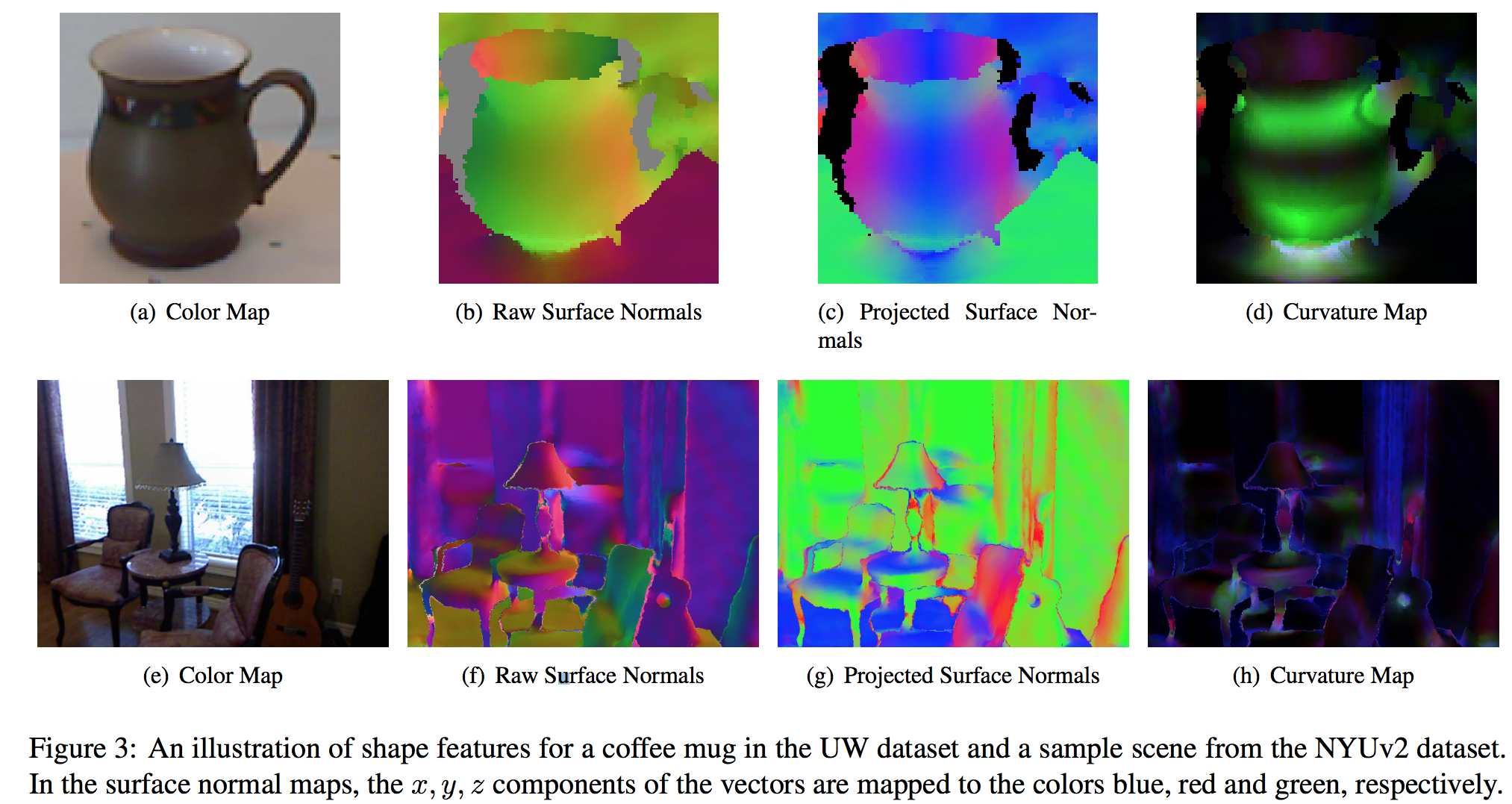
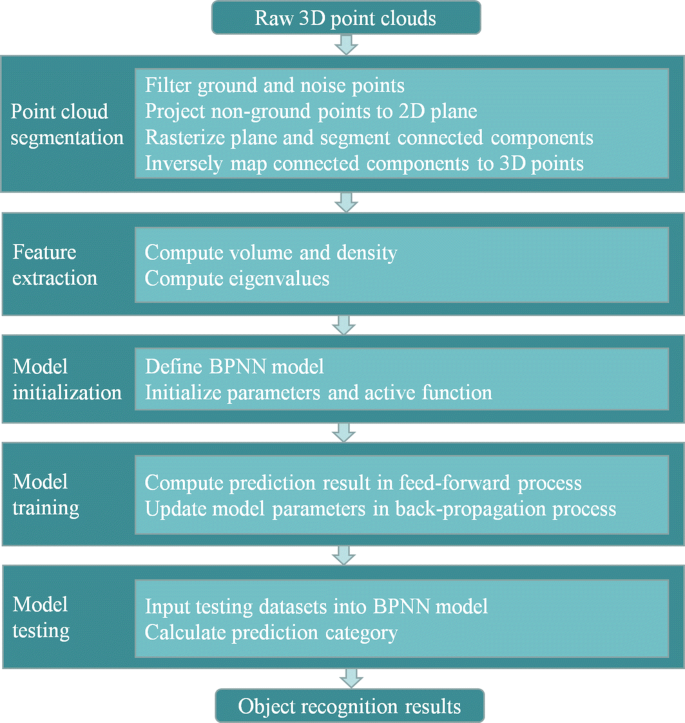
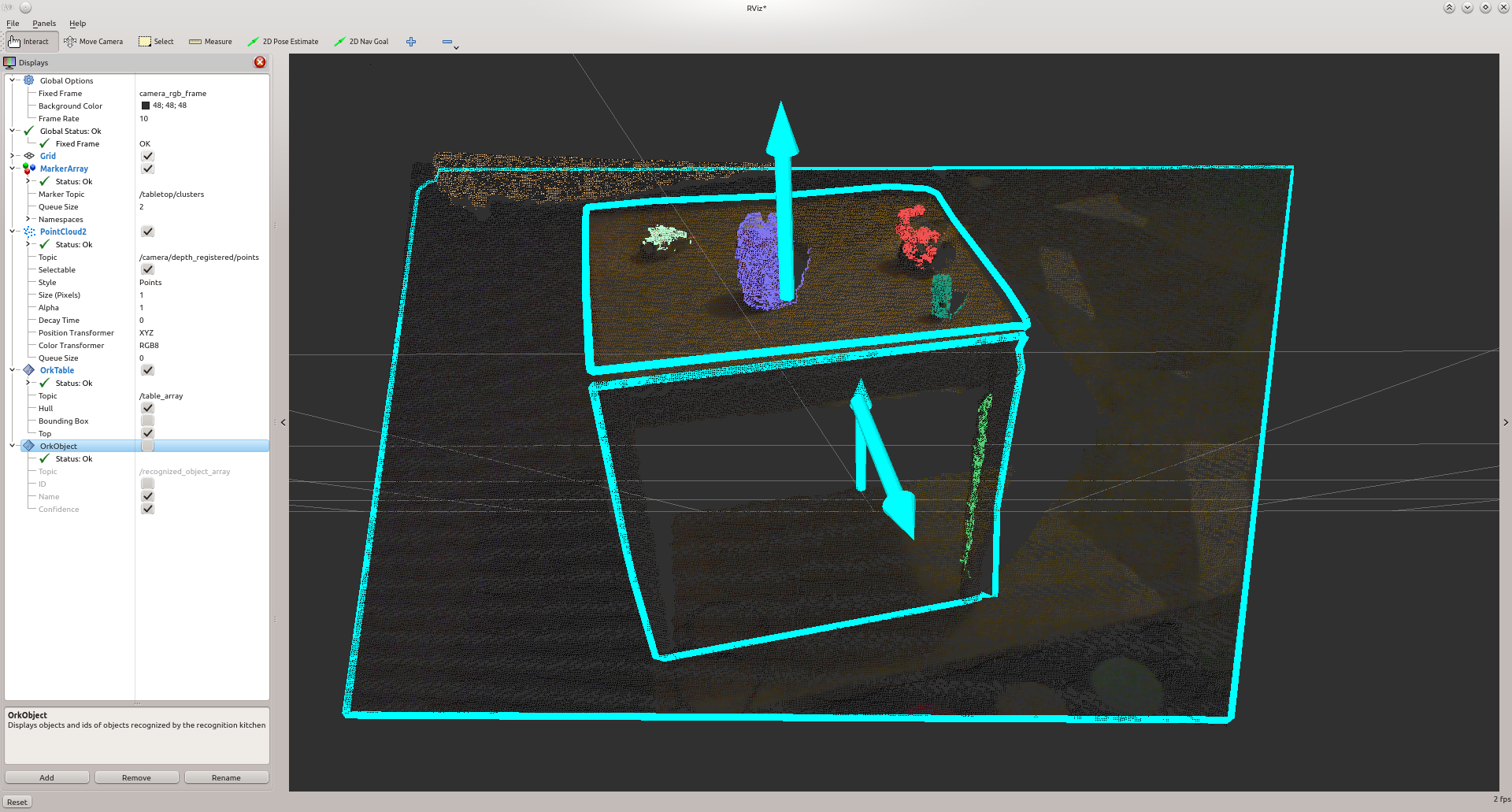
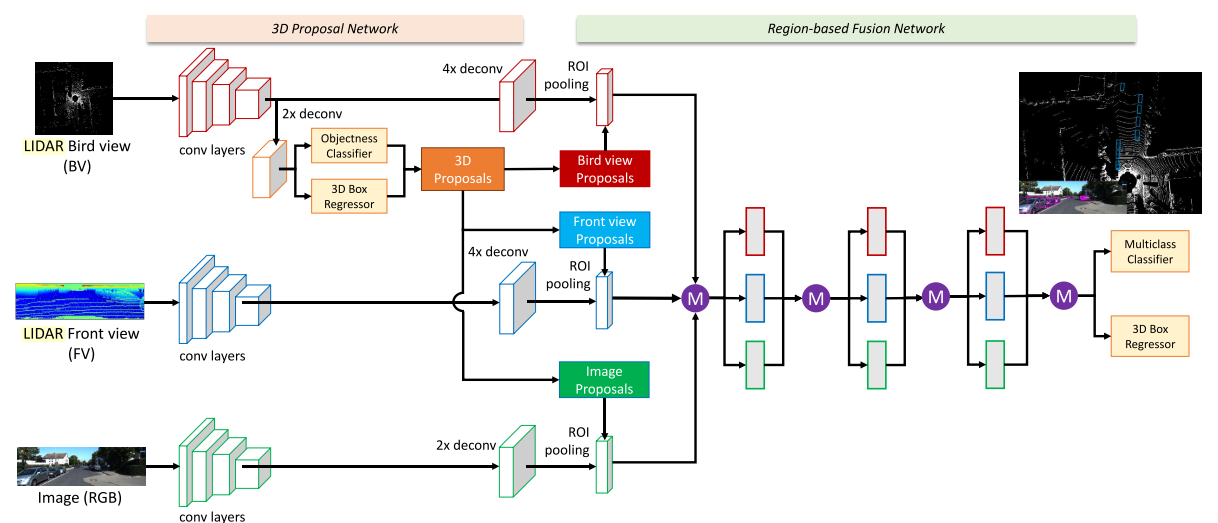
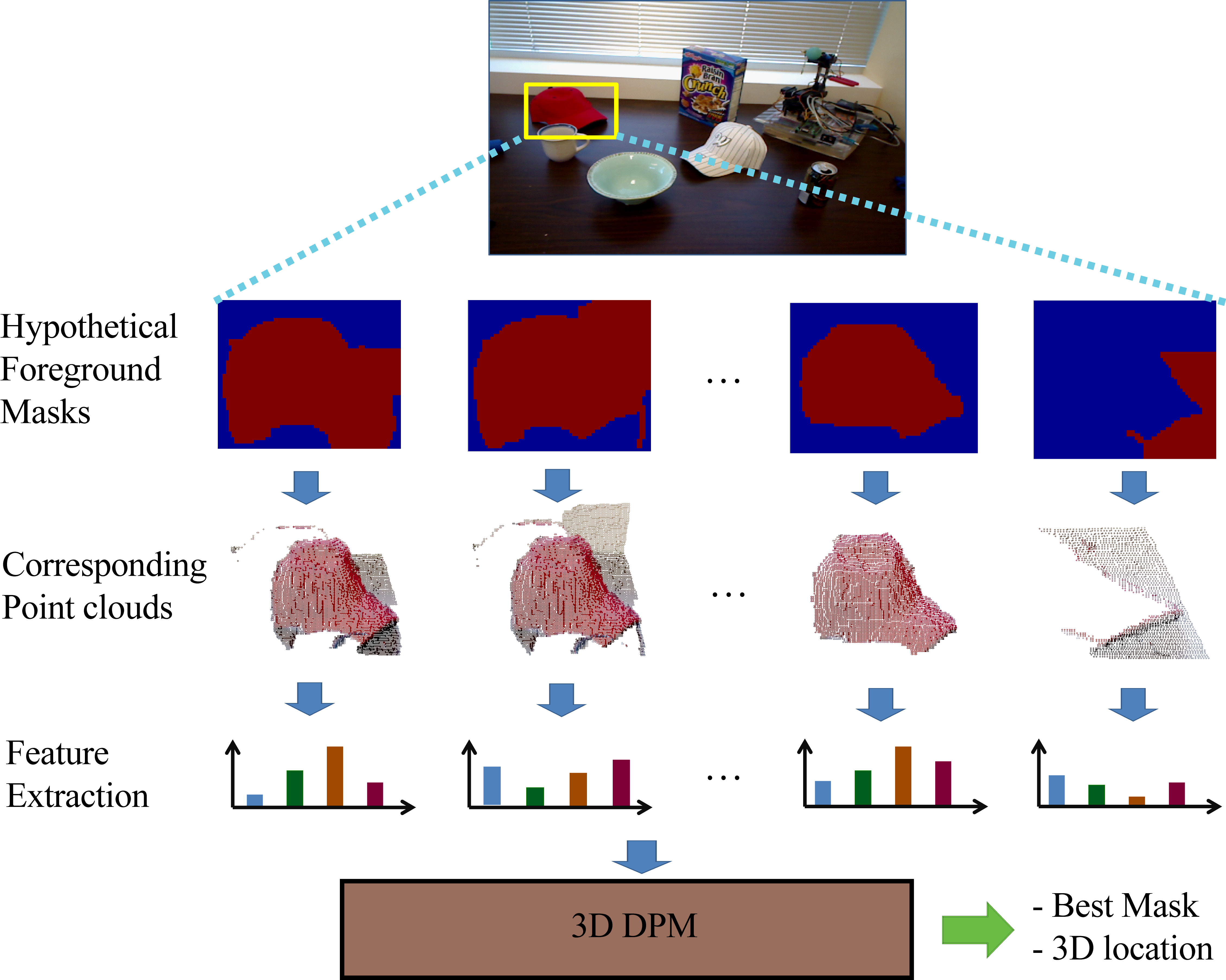
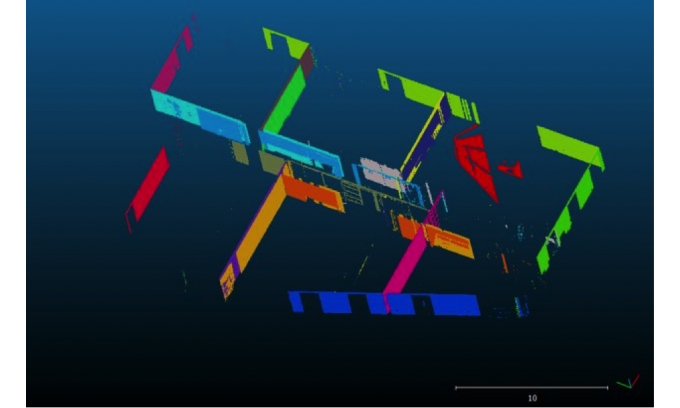
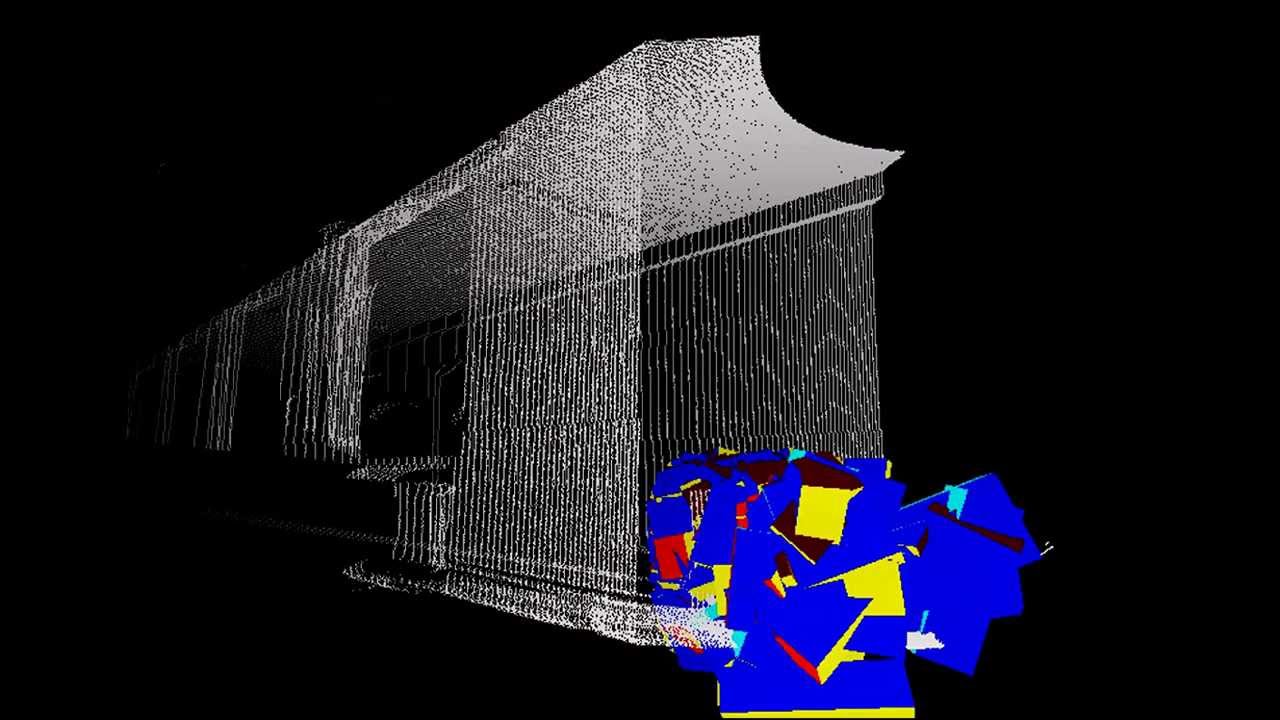
The system is decomposed into four steps. Locating seg menting characterizing and classifying clusters of 3d points. Integration with alexa and object recognition. Surfaces segmented from depth images are used as the features unlike interest point based algorithms which normally discard such data.
3d point cloud registration for localization using a deep auto encoder neural. For 3 d objects with segments not parallel or perpendicular such as curves the estimation of dominant direction may fail.

Cad Based 3d Objects Recognition In Monocular Images For Mobile
3d Object Recognition And Localization In Point Cloud Using
Point Cloud Neurohive
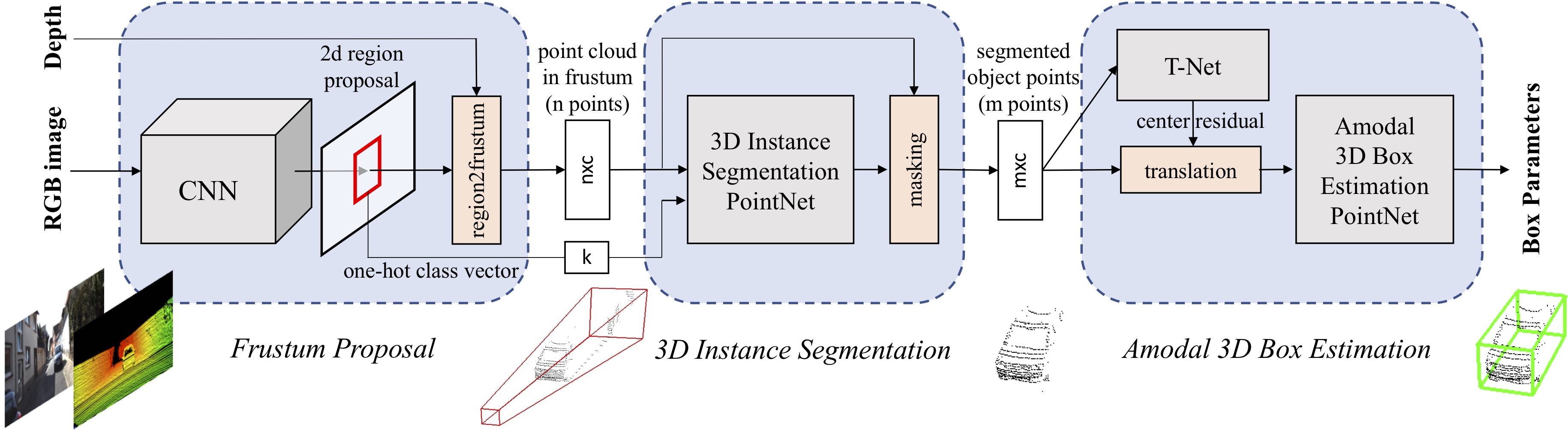
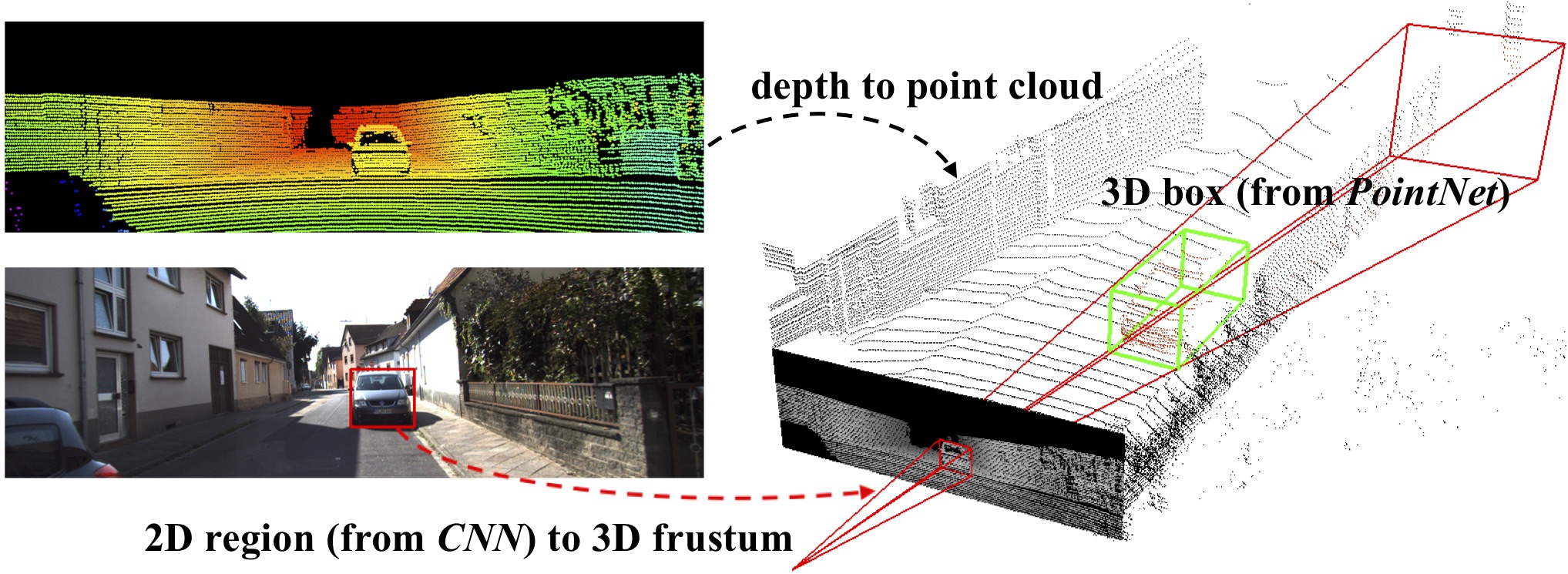
Frustum Pointnets

3d Object Detection Using Pcl Point Cloud Library